New version of the qruise-toolset
16. January 2025
We’re excited to introduce a new version of the qruise-toolset! This flexible software library is carefully designed to simulate and optimise quantum systems in a way that allows for easy customisation and smooth calculations. The latest updates to the qruise-toolset library, which is included in our advanced model learning software QruiseML, provide a new way of organising and understanding the most important concepts, providing users with a more streamlined experience.
What should users expect to gain from this update?
A logical interface that reuses code, allowing users to easily set up new simulations and optimisations
Seamless integration with QuTiP
A modular design that reduces interdependency and gives the user the freedom to write minimal code
Faster prototyping and feature releases with improved code quality and maintainability
Improved performance and efficiency, minimising resource utilisation
A library designed for parallel execution and seamless gradient-based optimisation
Improved documentation with many example use-cases for various quantum computing hardware platforms
What are the new features?
Hamiltonian description
The Hamiltonian is defined in two parts:
The stationary Hamiltonian is created using the
HamiltonianclassThe time-dependent Hamiltonian is added separately using the
add_term()function, where the first input specifies time-independent pre-factors (e.g., operators and stationary parameters) and the second input specifies the time-dependent term (e.g., the drive).
# define stationary Hamiltonian
H = Hamiltonian(sigmaz())
# define time-dependent Hamiltonian
H.add_term(sigmax(), drive)
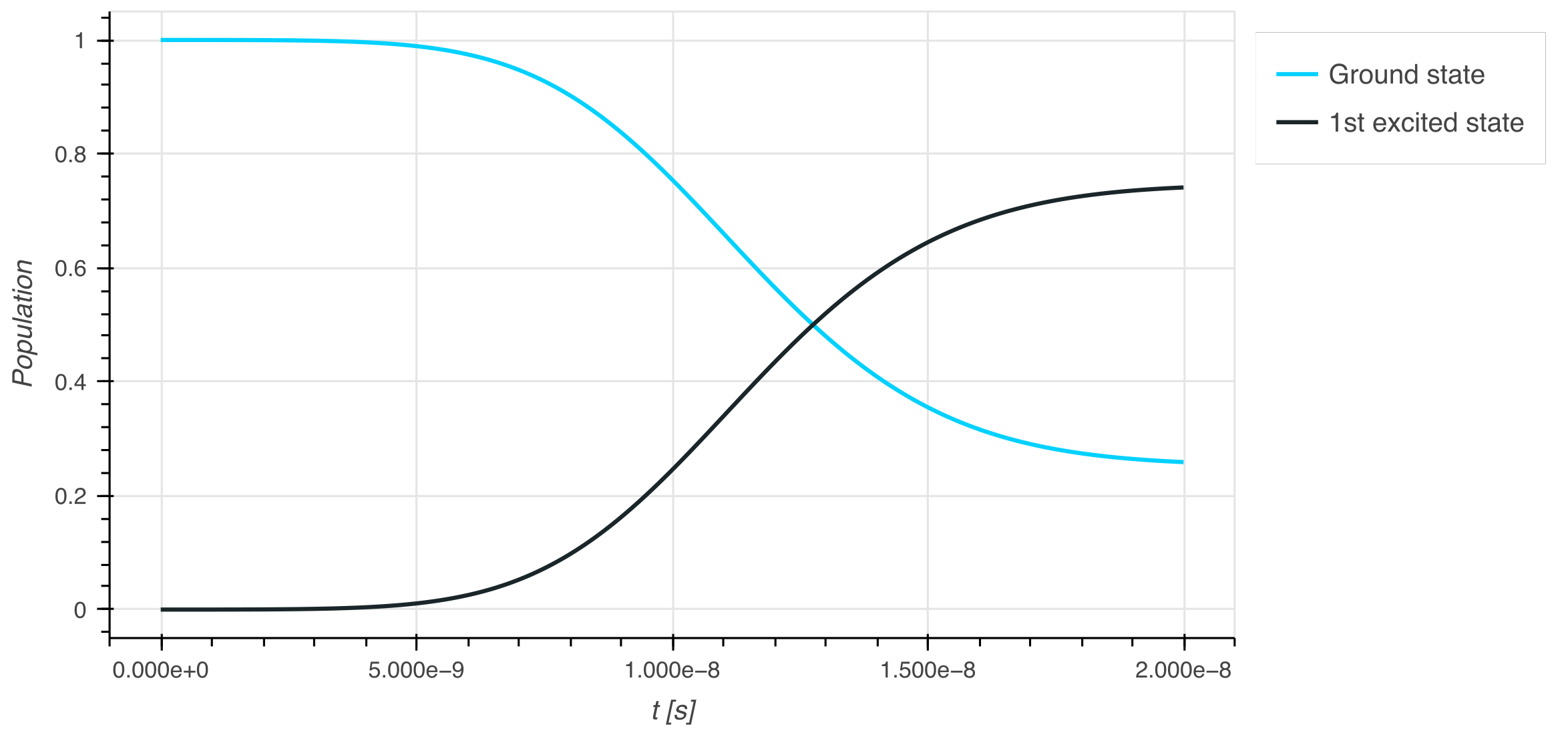
Quantum simulation problem
The Problem() class is used to specify a quantum simulation problem and is instantiated with the equations and parameters that govern the system:
the Hamiltonian,
Hthe initial condition (state vector or density matrix),
y0parameters that uniquely parametrise the Hamiltonian,
paramsthe time interval of the simulation, (
t0,t1)
The user chooses which equation they want the Problem to solve; for example, the Schrödinger equation or a master equation.
# define initial condition
y0 = np.array([1.0, 0.0], dtype=jnp.complex128)
# instantiate Problem with required inputs
prob = Problem(H, y0, params, (t0, t1))
# Solve Problem
prob.schroedinger() # using Schroedinger equation
prob.von_neumann() # using von Neumann equation
prob.lindblad(c_ops) # using Lindblad master equation
Solvers
The qruise-toolset provides two pre-built solvers for computing system dynamics:
Ordinary differential equation solver,
ODESolver: usesdiffraxfor numerical integration, allowing flexibility in solver choice (e.g.diffrax.Tsit5()) and parameters, such as tolerances (atol,rtol) and step size (dt0)Piece-wise constant solver,
PWCSolver: used when ODE solvers fail to converge; requires discretisation of the time domain with a fixed time step
# Option 1: ODESolver
solver = ODESolver(
diffrax.Tsit5(),
dt0=None,
saveat={"ts": ts},
atol=1e-8,
rtol=1e-6
)
# Option 2: PWCSolver
solver = PWCSolver(dt=1e-10, store=True)
# solve Schroedinger equation using PWCsolver
solver.set_system(prob.schroedinger())
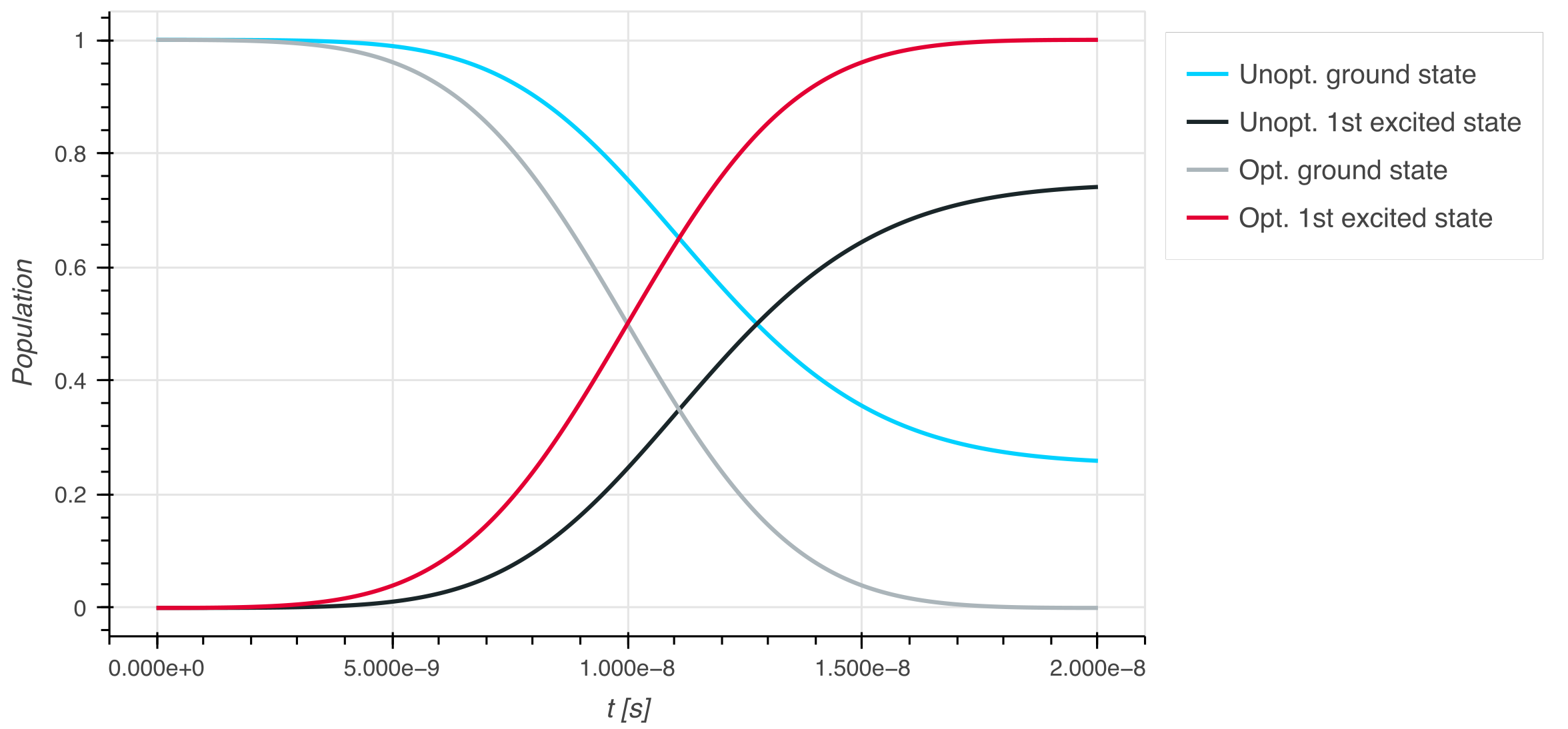
Quantum optimal control problem
Similar to the quantum simulation problem, the qruise-toolset also includes a quantum optimal control problem, QOCProblem. In addition to the required inputs for Problem, QOCProblem also requires a target state, yt, and a loss function, loss. The loss function specifies the aspect of the system's performance that needs to be minimised to achieve optimisation, such as the infidelity.
# define target state
yt = np.array([0.0, 1.0], dtype=jnp.complex128)
# instantiate quantum optimal control problem with required inputs
opt_prob = QOCProblem(H, y0, params, (t0, t1), yt, loss)
Ensemble problem
An EnsembleProblem can be used to parallelise a simulation over an ensemble of parameters, initial conditions, or time spans. There are two flavours of EnsembleProblem:
Element-wise product: the size of parameters, initial conditions, and time spans must match
Cartesian product: the size of parameters, initial conditions, and time spans can be chosen arbitrarily. The resultant ensemble is the Cartesian product (different combination) of different initial conditions, parameters, and time spans.
# define parameters with multiple values for "a"
params = {
"a": jnp.linspace(1.0e7, 1.0e8, 50),
"w": 0.8 * t1,
"omega": jnp.pi / t1 / 2
}
# solve EnsembleProblem parallelised over “a”
prob = EnsembleProblem(H, (y0, None), params, (t0, t1))
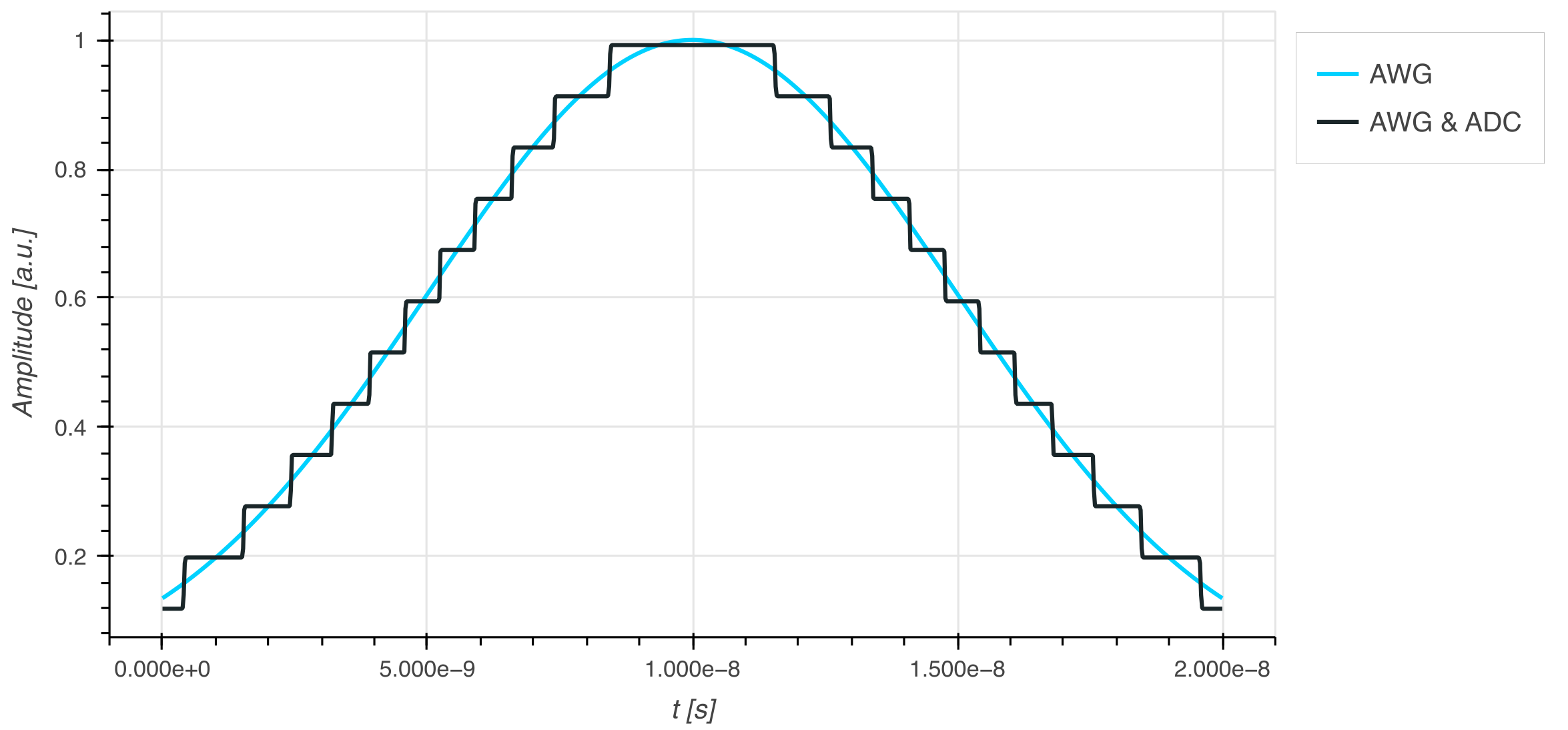
Signal chain
To easily emulate the behaviour of a control stack, a signal chain can be created where each component is added to the chain as a device or pseudo-device. This allows the user to model the impurities in signal generation, tune parameters to optimise gate operations, and counteract unwanted effects by designing suitable filter functions.
# store Gaussian parameters in dictionary
gauss_params = {
"amplitude": (amplitude, True),
"mean": (mean, True),
"sigma": (sigma, True),
}
# store ADC parameters in dictionary
adc_params = {
"nob": (nob, True),
"min_range": (min_range, True),
"max_range": (max_range, True),
}
gauss = Gaussian()
adc = ADC()
signal = Signal("ADCSimulation")
# add Gaussian and ADC as components named "AWG" and "ADC"
signal.add_from(["AWG", "ADC"], [gauss(), adc()], [gauss_params, adc_params])
Parameter collection
The ParameterCollection class provides a centralised and structured way to manage parameters, ensuring a single source of truth while avoiding inconsistencies or dangling definitions. It supports validation, batch updates, individual modifications, and clear representations, making parameter management reliable, efficient, and extendable.
pc = ParameterCollection()
params = {"amp": 1.0, "sigma": 2.0}
pc.add_param("key", 1.0) # add parameter to parameter collection
pc.add_dict(params) # add set of parameters
pc.get_val("key") # get value of parameter "key"
pc.get_collection() # gets all parameters in collection
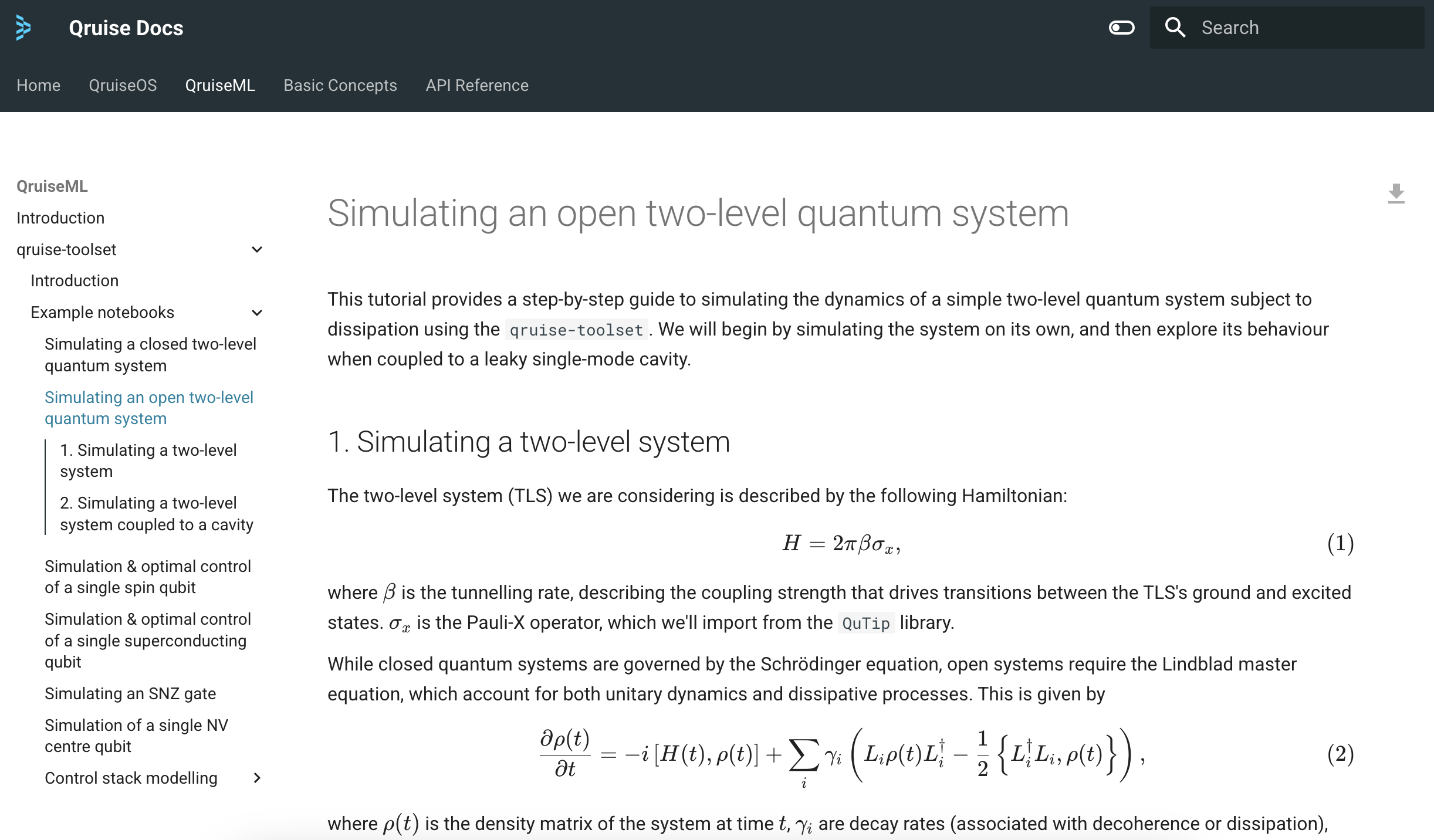
Documentation website
We've also launched a fully revamped documentation website for the qruise-toolset at docs.qruise.com/qruiseml/toolset/intro. This features walk-through examples at varying levels of complexity for many different quantum technology platforms, starting from simple two-level systems, and building up to sophisticated control stack modelling. These examples are available as executable Jupyter notebooks, making it easy to get started with the qruise-toolset.
More updates coming soon!
Stay tuned for more updates, including additional features for noise modelling and performance benchmarks to compare the qruise-toolset with other tools in the quantum field!
Contact us today at info@qruise.com to get access to the qruise-toolset or book a demo now!
Stay informed with our newsletter
Subscribe to our newsletter to get the latest updates on our products and services.